




Dynamik und Steuerung
 |
 |
 |
 |
|---|
Überall gibt es Beispiele für Rückkopplungssteuerungen. Es gibt 3 wesentliche Elemente eines rückgekoppelten Steuersystems.
- Aktor, der manipuliert und eine Aktion auslöst
- Sensor, der die Reaktion misst
- Regler, der den Aktor als Reaktion auf die Messung einstellt
Der Regler empfängt die Sensormessung und vergleicht sie mit dem Ziel (Sollwert), um festzustellen, welche Einstellung am Aktor erforderlich ist. Einige Stellantriebe sind binär, wie z. B. EIN/AUS, während andere kontinuierlich sind, wie z. B. prozentuale Öffnung (0-100 %). Nachfolgend einige Beispiele für Regler mit Rückkopplung.
Beispiel 1: Gebäudetemperaturregelung
Ein bekanntes Beispiel für einen Regler ist die Temperaturregelung eines Gebäudes im Winter mit einer Heizung (Stellglied), einem Sensor (Temperaturthermistor) und einem Regler (Thermostat). Der Regler schaltet die Heizung ein, wenn die Temperatur unter einen bestimmten Wert fällt, und schaltet die Heizung aus, wenn die Temperatur über einen bestimmten Wert steigt. Eine Störgröße kann eine Änderung der Außenlufttemperatur oder eine Änderung der Innentemperatur durch das Öffnen einer Tür sein.
| Element | Temperaturregelung |
| Stellantrieb | Ventil oder Schalter im Heizgerät, Brennstoff zum Ofen |
| Sollwert des Reglers | Solltemperatur im Innenraum |
| Fühler | Temperaturfühler wie Thermoelement oder Thermistor |
| Störungen | Türöffnung, Wind, Außentemperatur |
Beispiel 2: Geschwindigkeitsregelung im Auto
Betrachten Sie ein Auto mit einem automatischen Geschwindigkeitsregler. Der Fahrer kann den Geschwindigkeitssollwert für den Regler einstellen. Das Steuergerät passt die Gaspedalstellung (Aktuator) als Reaktion auf Änderungen der Tachometeranzeige (Sensor) an. Eine Störgröße kann ein herannahender Hügel oder Wind sein, der eine Abweichung der Geschwindigkeit vom gewünschten Sollwert verursachen würde.
| Element | Cruise Control |
| Aktuator | Gaspedalstellung, Kraftstoff zum Motor |
| Sollwert des Reglers | Gewünschte Geschwindigkeit (mph oder km/sec) |
| Sensor | Tachometer, gemessene Geschwindigkeit |
| Störungen | Hügel, Wind, andere Fahrzeuge |
Prozessschema
Ein Prozessschema kann durch Kreise ergänzt werden, die den Typ des Senders oder des Steuergeräts erkennen lassen.
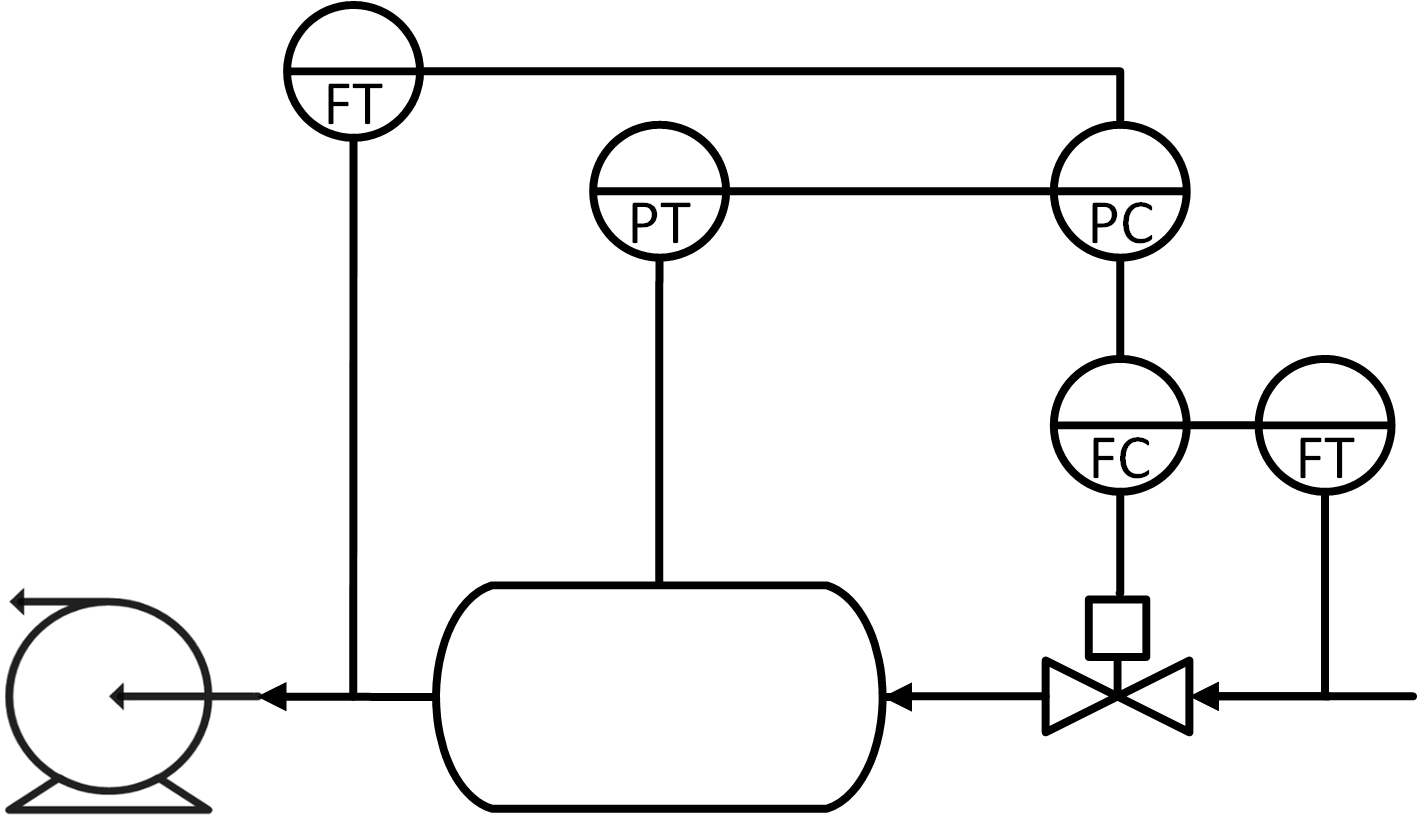
Zwei Buchstaben im Kreisnamen geben an, welche Größe gemessen wird und ob es sich um einen Messwertgeber oder einen Regler handelt.
| Messung (Buchstabe 1) | Beschreibung |
| A | Analysator (Mol- oder Massenanteil) |
| C | Konzentration |
| F | Durchfluss |
| I | Strom |
| L | Füllstand |
| P | Druck |
| R | Widerstand |
| S | Geschwindigkeit |
| T | Temperatur |
| V | Vibration |
| X | Verschiedenes |
| Gerät (Buchstabe 2) | Beschreibung |
| C | Controller |
| E | Element |
| I | Indikator |
| M | Motor |
| S | Schalter |
| T | Transmitter/Transducer |
| V | Ventil |
| X | Sonstiges |
| Z | Sicherheitseinrichtung |
Das obige Diagramm hat einen FT=Durchflusstransmitter, PT=Drucktransmitter, PC=Druckregler, FC=Durchflussregler und FT=Durchflusstransmitter. FT/FC und PT/PC bilden beide Rückkopplungsschleifen, da sie die gleiche Größe messen und regeln. Der FC erhält einen Sollwert vom oberen PC, um einen Kaskadenregler mit zwei Rückkopplungsschleifen zu bilden. Der obere FT misst eine Druckstörung und liefert ein Feedforward-Element für die Druckregelung. Vorwärts- und Kaskadenregler werden hinzugefügt, um zusätzliche Störungen zu unterdrücken, und sind fortschrittlicher als herkömmliche Rückkopplungsregelungen.
Blockdiagramme
Blockdiagramme zeigen die Blöcke eines Regelsystems mit den Verbindungen, die die Richtung und die Anschlüsse der Eingänge und Ausgänge bestimmen. Ein rückgekoppeltes Steuersystem besteht aus einem Sensor, einem Stellglied und einem Regler, die miteinander verbunden sind und deren Informationen in einer Schleife fließen. Die Schleife wird dadurch gebildet, dass der Sensor Informationen an den Regler liefert. Der Regler ändert den Reglerausgang, der wiederum den Prozess verändert. Der Prozess wird erneut gemessen und der Zyklus wiederholt sich.
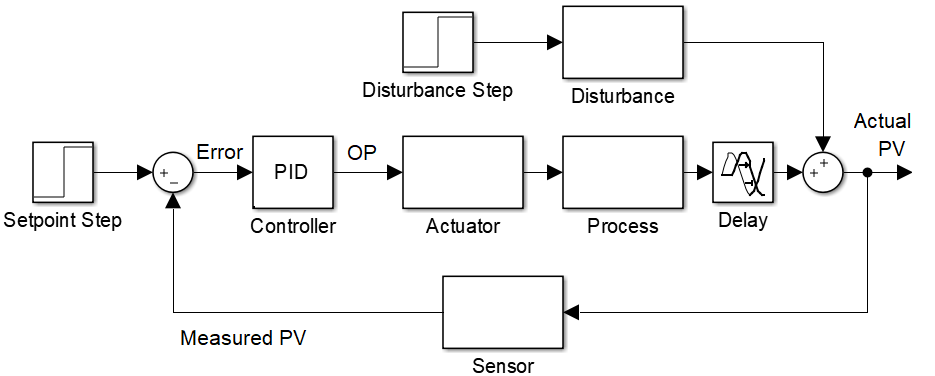
Blockdiagramme unterscheiden sich von Prozessdiagrammen dadurch, dass sie den Informationsfluss darstellen und nicht unbedingt die physische Anordnung der Geräte.
Steuerungsterminologie
Es gibt unterschiedliche Terminologien, wenn man über gängige Regler wie Proportional-Integral-Derivative (PID) oder fortgeschrittene Regler wie Model Predictive Control (MPC) spricht. Nachfolgend finden Sie eine Tabelle mit einigen Begriffen und zugehörigen Abkürzungen.
| Element | Gemeinsame Regelung (PID) | Erweiterte Regelung (MPC) |
| Aktor | Reglerausgang (CO) oder Ausgang (OP) | Stellgröße (MV) |
| Regler | Sollwert (SP) | Sollwert (SP) oder Bereich (SPHI/SPLO) |
| Sensor | Prozessvariable (PV) | Gesteuerte Variable (CV) |
| Störgröße | Störgröße (DV) | Störgröße (DV) |