




Dynamika i sterowanie
 |
 |
 |
 |
|---|
Wszędzie można znaleźć przykłady regulatorów ze sprzężeniem zwrotnym. Istnieją 3 zasadnicze elementy systemu sterowania ze sprzężeniem zwrotnym.
- Siłownik, który manipuluje i powoduje działanie
- Czujnik, który mierzy reakcję
- Sterownik, który reguluje siłownik w odpowiedzi na pomiar
Sterownik otrzymuje pomiar z czujnika i porównuje go z celem (punktem nastawy), aby określić, jaka regulacja siłownika jest potrzebna. Niektóre elementy wykonawcze są binarne, takie jak ON/OFF, podczas gdy inne są ciągłe, takie jak procent otwarcia (0-100%). Poniżej znajduje się kilka przykładów kontrolerów ze sprzężeniem zwrotnym.
Przykład 1: Kontrola temperatury w budynku
Jeden znany przykład kontrolera to kontrola temperatury w budynku w zimie obejmuje grzejnik (siłownik), czujnik (termistor temperatury) i kontroler (termostat). Regulator włącza grzejnik, gdy temperatura spada poniżej pewnego poziomu i wyłącza grzejnik, gdy temperatura wzrasta powyżej pewnego poziomu. Zmienną zakłócającą może być zmiana temperatury powietrza zewnętrznego lub zmiana temperatury wewnętrznej spowodowana otwarciem drzwi.
| Element | Regulacja temperatury |
| Aktuator | Zawór lub przełącznik w nagrzewnicy, Paliwo do pieca |
| Punkt nastawy sterownika | Pożądana temperatura w pomieszczeniu |
| Czujnik | Czujnik temperatury taki jak termopara lub termistor |
| Zakłócenia | Otwarcie drzwi, wiatr, temperatura na zewnątrz |
Przykład 2: Automobile Speed Control
Rozważmy samochód z automatycznym tempomatem. Kierowca może dostosować wartość zadaną prędkości do sterownika. Sterownik dostosowuje położenie pedału gazu (aktuator) w odpowiedzi na zmiany w odczycie prędkościomierza (czujnik). Zmienną zakłócającą może być zbliżające się wzgórze lub wiatr, który spowodowałby odchylenie prędkości od żądanego punktu nastawy.
| Element | Kontrola tempomatu |
| Aktuator | Położenie pedału gazu, Paliwo do silnika |
| Punkt nastawy sterownika | Pożądana prędkość (mph lub km/s) |
| Czujnik | Speedometr, zmierzona prędkość |
| Zakłócenia | Pagórki, wiatr, inne samochody |
Schemat procesu
Schemat procesu można uzupełnić o kółka, które ujawniają typ przetwornika lub sterownika.
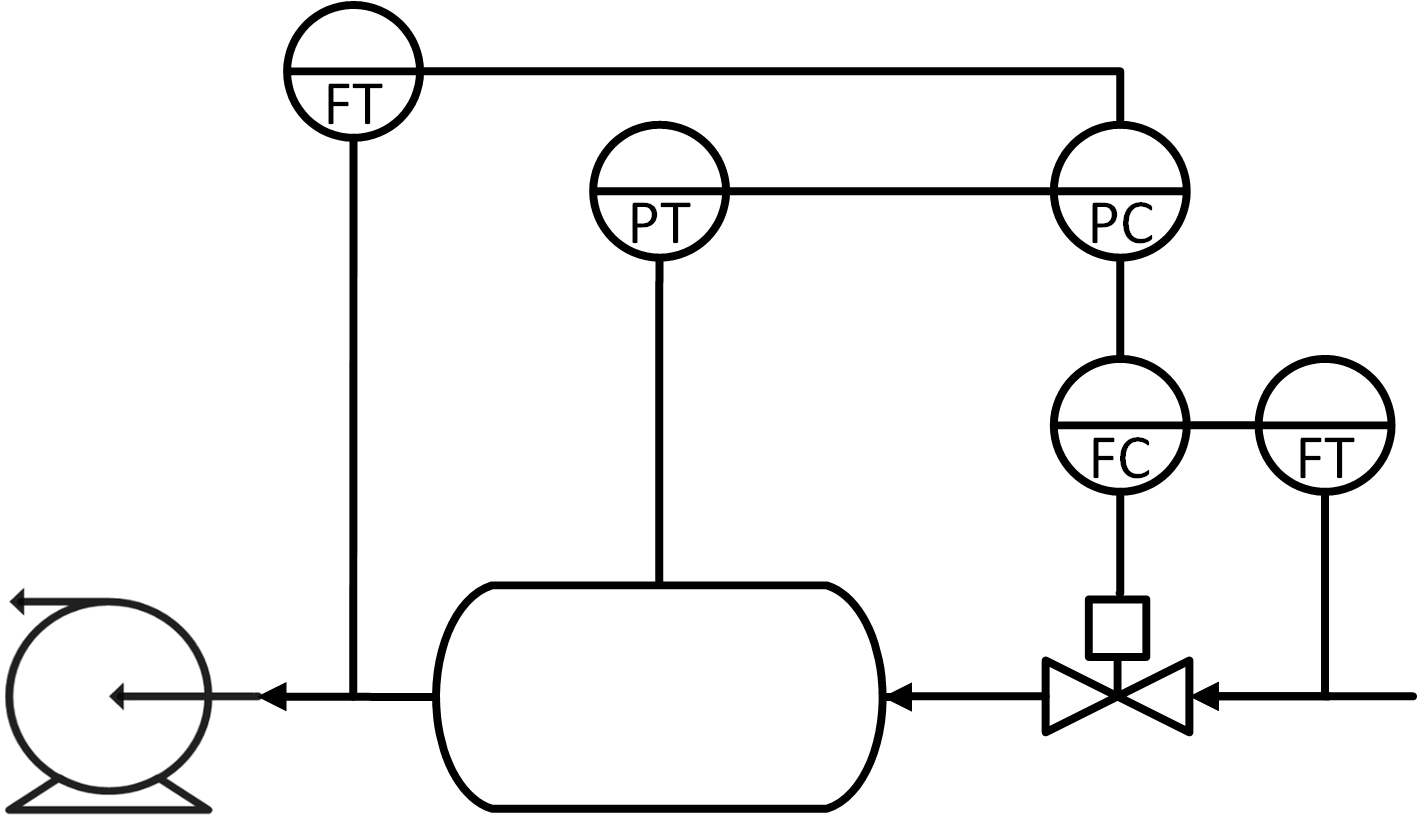
Dwie litery w nazwie okręgu wskazują mierzoną wielkość oraz to, czy jest to przetwornik czy sterownik.
| Pomiar (litera 1) | Opis |
| A | Analizator (mol lub ułamek masowy) |
| C | Stężenie |
| F | Przepływ |
| I | Prąd |
| L | Poziom |
| P | Ciśnienie |
| R | Odporność |
| S | Prędkość |
| T | Temperatura |
| V | Wibracje |
| X | |
| E | Element |
| I | Wskaźnik |
| M | Silnik |
| S | Wyłącznik |
| T | Transmiter/Przetwornik |
| V | Zawór |
| X | Różne |
| Z | Urządzenie zabezpieczające |
Powyższy schemat zawiera FT=przetwornik przepływu, PT=przetwornik ciśnienia, PC=sterownik ciśnienia, FC=sterownik przepływu i FT=przetwornik przepływu. FT/FC i PT/PC tworzą pętle sprzężenia zwrotnego, ponieważ mierzą i kontrolują tę samą wielkość. FC otrzymuje wartość zadaną z PC powyżej, aby stworzyć sterownik kaskadowy z dwóch pętli sprzężenia zwrotnego. Górny FT mierzy zaburzenie ciśnienia i dostarcza element wyprzedzający do regulacji ciśnienia. Regulatory feedforward i kaskadowe są dodawane w celu odrzucenia dodatkowych zakłóceń i są bardziej zaawansowane niż zwykłe sterowanie ze sprzężeniem zwrotnym.
Schematy blokowe
Schematy blokowe pokazują bloki systemu sterowania z wzajemnymi połączeniami, które określają kierunek i połączenia wejść i wyjść. System sterowania ze sprzężeniem zwrotnym składa się z czujnika, siłownika i sterownika, które są połączone informacją przepływającą w pętli. Pętla jest tworzona przez czujnik dostarczający informacje do sterownika. Sterownik zmienia wyjście sterownika, który następnie zmienia proces. Proces jest mierzony ponownie i cykl się powtarza.
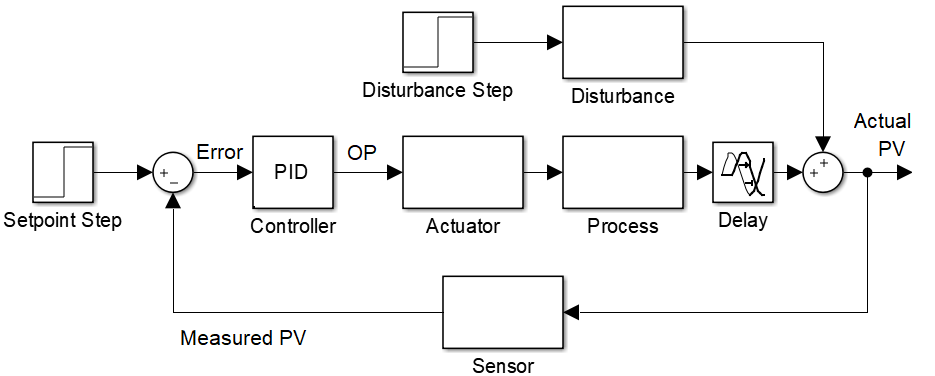
Schematy blokowe różnią się od schematów procesów tym, że są schematami przepływu informacji, niekoniecznie tym, jak elementy wyposażenia są fizycznie rozmieszczone.
Terminologia sterowania
Istnieje inna terminologia, gdy mówimy o wspólnych kontrolerach, takich jak proporcjonalno-całkująco-pochodna (PID) lub zaawansowanych kontrolerach, takich jak sterowanie predykcyjne (MPC). Poniżej znajduje się tabela z niektórymi terminami i związanymi z nimi skrótami.
| Element | Powszechne sterowanie (PID) | Zaawansowane sterowanie (MPC) | |
| Aktuator | Wyjście sterownika (CO) lub wyjście (OP) | Zmienna manipulowana (MV) | |
| Sterownik | Punkt nastawy (SP) | Punkt nastawy (SP) lub zakres (SPHI/SPLO) | |
| Czujnik | Zmienna procesowa (PV) | Zmienna sterowana (CV) | Zmienna sterowana (CV) |
| Zmienna sterowana Zmienna (CV) | |||
| Zakłócenie | Zmienna zakłócająca (DV) | Zmienna zakłócająca (DV) |