




Dynamik og regulering
 |
 |
 |
 |
|---|
Der findes eksempler på feedback-regulatorer overalt. Der er 3 væsentlige elementer i et tilbagekoblet styresystem.
- Aktuator, der manipulerer og forårsager en handling
- Sensor, der måler reaktionen
- Regulator, der justerer aktuatoren som reaktion på målingen
Regulatoren modtager sensorens måling og sammenligner den med målet (setpunktet) for at bestemme, hvilken justering der er nødvendig for aktuatoren. Nogle aktuatorer er binære, f.eks. ON/OFF, mens andre er kontinuerlige, f.eks. procent åben (0-100 %). Nedenfor er der et par eksempler på feedback-regulatorer.
Eksempel 1: Temperaturstyring af en bygning
Et velkendt eksempel på en regulator er temperaturstyring af en bygning om vinteren, der omfatter et varmelegeme (aktuator), en sensor (temperaturtermistor) og en regulator (termostat). Regulatoren tænder for varmelegemet, når temperaturen falder under et bestemt niveau, og slukker for varmelegemet, når temperaturen stiger over et bestemt niveau. En forstyrrende variabel kan være ændringer i den udendørs lufttemperatur eller en ændring i den indendørs temperatur som følge af en døråbning.
| Element | Temperaturstyring |
| Aktuator | Ventil eller afbryder i varmelegeme, Brændstof til fyret |
| Regulatorens setpunkt | Ønsket temperatur indendørs |
| Sensor | Temperatursensor, f.eks. et termoelement eller en termistor |
| Forstyrrelse | Døråbning, vind, temperatur udenfor |
Eksempel 2: Bilers fartkontrol
Tænk på en bil med en automatisk fartpilot. Føreren kan justere hastighedssætpunktet for regulatoren. Styringen justerer gaspedalens stilling (aktuator) som reaktion på ændringer i hastighedsmålerens aflæsning (sensor). En forstyrrende variabel kan være en nærmer sig en bakke eller vind, som vil medføre en afvigelse af hastigheden fra det ønskede setpunkt.
| Element | Cruise Control |
| Aktuator | Gaspedalposition, Brændstof til motoren |
| Sætpunkt for styreenhed | Ønsket hastighed (mph eller km/sek.) |
| Sensor | Speedometer, målt hastighed |
| Forstyrrelser | Bakker, vind, andre biler |
Processkema
Et processkema kan suppleres med cirkler, der afslører typen af sender eller styring.
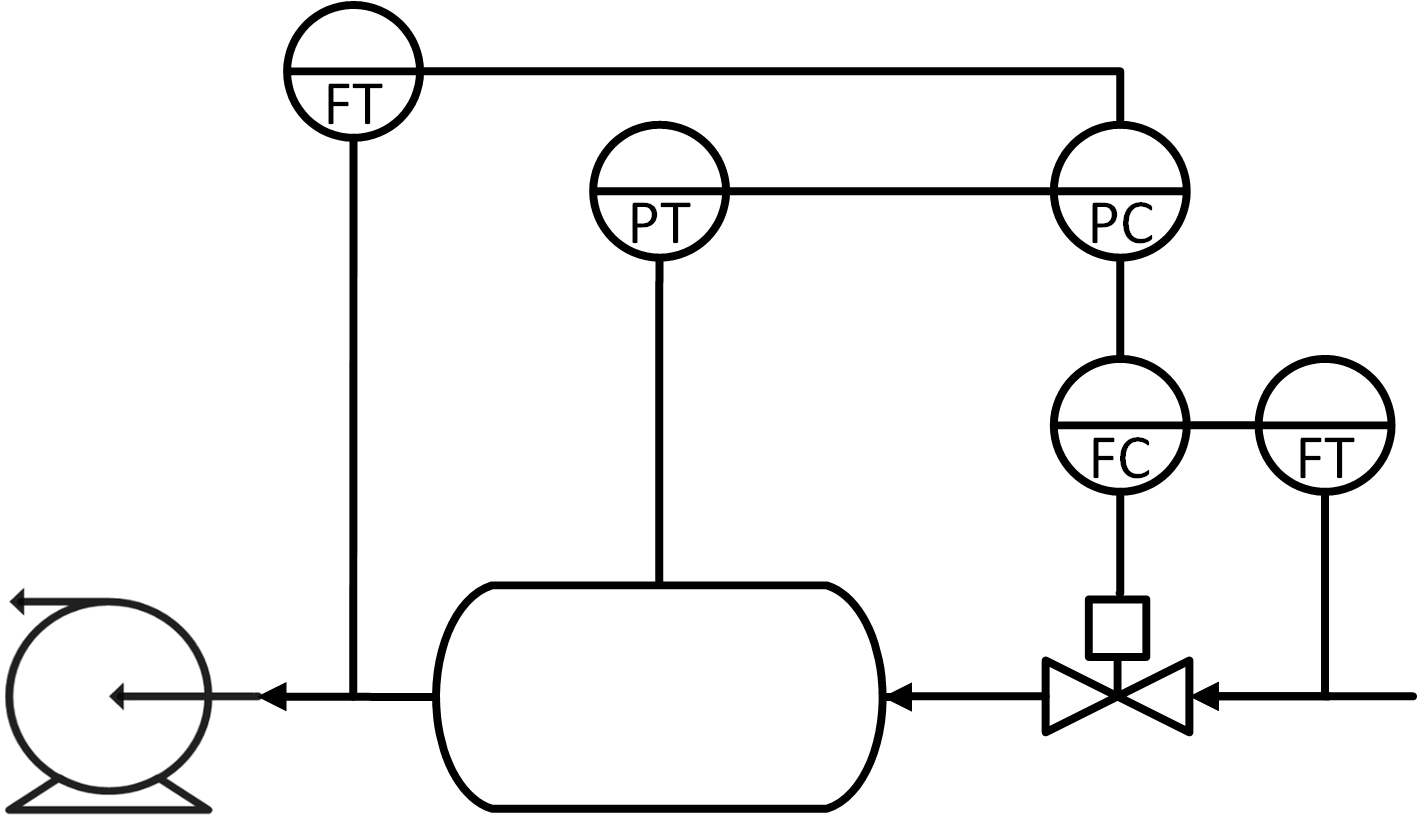
To bogstaver i cirklens navn angiver, hvilken størrelse der måles, og om der er tale om en transmitter eller en regulator.
| Måling (bogstav 1) | Beskrivelse | |
| A | Analysator (mol- eller massebrøkdel) | |
| C | Koncentration | |
| F | Flow | |
| I | Strøm | |
| L | Niveau | |
| P | Tryk | |
| R | Modstand | |
| Resistens | ||
| S | S | Hastighed |
| T | Temperatur | |
| V | Vibration | |
| X | Diverse | |
| Enhed (bogstav 2) | Beskrivelse | |
| C | C | Controller |
| E | Element | |
| I | Indikator | |
| M | M | Motor |
| S | S | Kontakt |
| T | Sender/transducer | |
| V | Ventil | |
| X | Diverse | |
| Z | Sikkerhedsanordning |
Diagrammet ovenfor har en FT=Flow Transmitter, PT=Tryktransmitter, PC=Trykregulator, FC=Flow Controller og FT=Flow Transmitter. FT/FC og PT/PC danner begge feedbacksløjfer, fordi de måler og regulerer den samme størrelse. FC modtager et sætpunkt fra PC’en ovenfor for at skabe en kaskaderegulator af to feedbackkredsløb. Den øverste FT måler en trykforstyrrelse og giver et feedforward-element til trykreguleringen. Feedforward- og kaskaderegulatorer tilføjes for at afvise yderligere forstyrrelser og er mere avancerede end almindelig feedback-regulering.
Blockdiagrammer
Blockdiagrammer viser blokkene i et reguleringssystem med de indbyrdes forbindelser, der bestemmer retningen og forbindelserne mellem ind- og udgange. Et feedbackstyringssystem består af en sensor, en aktuator og en controller, der er forbundet med information, der flyder i et loop. Sløjfen skabes ved, at sensoren leverer oplysninger til regulatoren. Styringen ændrer styringens output, som derefter ændrer processen. Processen måles igen, og cyklussen gentages.
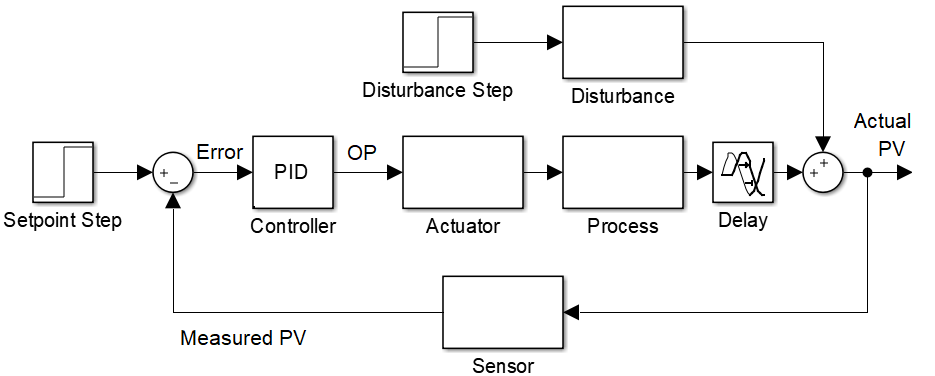
Blockdiagrammer adskiller sig fra et procesdiagram, idet det er et diagram over informationsstrømmen, ikke nødvendigvis hvordan udstyrsstykkerne er fysisk placeret.
Reguleringsterminologi
Der er forskellige terminologier, når man taler om almindelige regulatorer såsom Proportional Integral Derivative (PID) eller avancerede regulatorer såsom Model Predictive Control (MPC). Nedenfor er der en tabel med nogle af terminologien og de tilhørende forkortelser.
| Element | Kommelig regulering (PID) | Avanceret regulering (MPC) |
| Aktuator | Regulatorudgang (CO) eller udgang (OP) | Manipuleret variabel (MV) |
| Regulator | Setpunkt (SP) | Sætpunkt (SP) eller område (SPHI/SPLO) |
| Sensor | Procesvariabel (PV) | Styret Variabel (CV) |
| Forstyrrelser | Forstyrrelsesvariabel (DV) | Forstyrrelsesvariabel (DV) |