




Dynamiikka ja ohjaus
 |
 |
 |
 |
|---|
Takaisinkytketyistä säätimistä on esimerkkejä kaikkialla. Takaisinkytkettyyn säätöjärjestelmään kuuluu 3 olennaista elementtiä:
- Toimilaite, joka manipuloi ja aiheuttaa toiminnon
- Sensori, joka mittaa vasteen
- Säädin, joka säätää toimilaitetta mittauksen perusteella
Säädin vastaanottaa sensorin mittaustuloksen ja vertaa sitä tavoitearvoon (asetuspisteeseen) päättääkseen, millaista säätöä tarvitsisi toimilaitteeseen tehdä. Jotkin toimilaitteet ovat binäärisiä, kuten ON/OFF, kun taas toiset ovat jatkuvia, kuten prosenttia auki (0-100 %). Alla on pari esimerkkiä takaisinkytketyistä säätimistä.
Esimerkki 1: Rakennuksen lämpötilan säätö
Yksi tunnettu esimerkki säätimestä on rakennuksen lämpötilan säätö talvella sisältää lämmittimen (toimilaite), anturin (lämpötilatermistori) ja säätimen (termostaatti). Säädin kytkee lämmittimen päälle, kun lämpötila laskee alle tietyn tason, ja kytkee lämmittimen pois päältä, kun lämpötila nousee yli tietyn tason. Häiriömuuttuja voi olla ulkoilman lämpötilan muutos tai oven avaamisesta johtuva sisälämpötilan muutos.
| Elementti | Lämpötilan säätö |
| Actuator | Venttiili tai kytkin lämmittimessä, Polttoaineen syöttö uuniin |
| Säätimen asetusarvo | Toivottu lämpötila sisätiloissa |
| Asennin | Lämpötila-anturi, kuten termoelementti tai termistori |
| Häiriö | Ovet aukeavat, tuuli, ulkolämpötila |
Esimerkki 2: Autojen nopeudensäätö
Harkitaan autoa, jossa on automaattinen vakionopeudensäädin. Kuljettaja voi säätää nopeuden asetusarvoa säätimelle. Säädin säätää kaasupolkimen asentoa (toimilaite) vastauksena nopeusmittarin lukeman (anturi) muutoksiin. Häiriömuuttuja voi olla lähestyvä mäki tai tuuli, joka aiheuttaa nopeuden poikkeaman halutusta asetusarvosta.
| Elementti | Cruise Control |
| Actuator | Gasupolkimen asento, Polttoaineen syöttö moottoriin |
| Säätimen asetusarvo | Toivottu nopeus (mph tai km/sek) |
| Sensori | Nopeusmittari, mitattu nopeus |
| Häiriö | Mäet, tuuli, muut autot |
Prosessikaavio
Prosessikaaviota voidaan täydentää ympyröillä, joista käy ilmi lähettimen tai ohjaimen tyyppi.
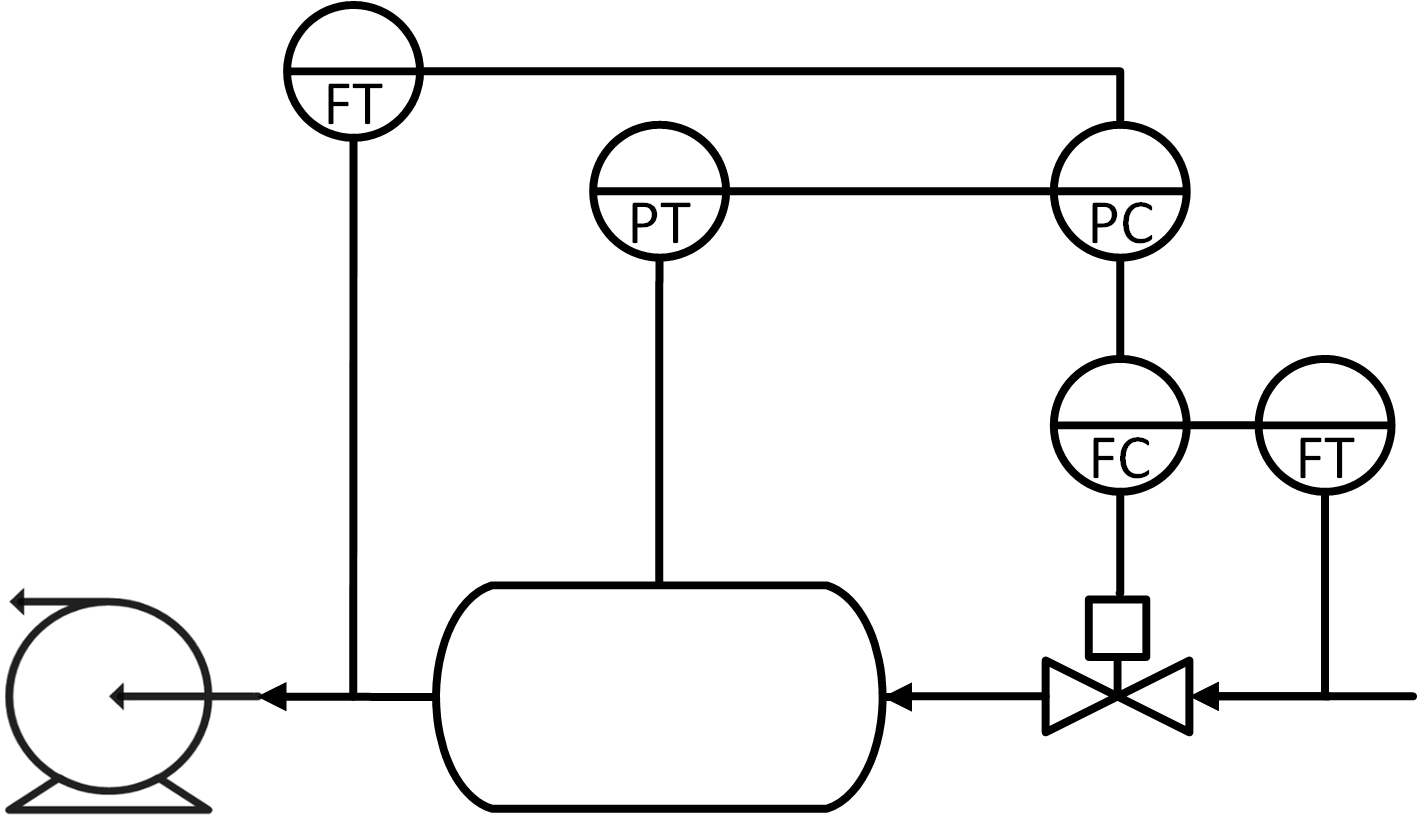
Ympyrän nimessä olevat kaksi kirjainta ilmaisevat mitattavan suureen ja sen, onko kyseessä lähetin vai säädin.
| Mittaus (kirjain 1) | Kuvaus |
| A | Analysaattori (mooli tai massaosuus) |
| C | Konsentraatio |
| F | Virtaus |
| I | Virtaama |
| L | Level |
| P | Pressure |
| R | Resistance |
| S | Nopeus |
| T | Lämpötila |
| V | Värähtely |
| X | Muuta |
| Laite (kirjain 2) | Kuvaus |
| C | Säätölaite | Säädin |
| E | Elementti |
| I | Indicator |
| M | Moottori |
| S | Kytkin |
| T | Lähetin/anturi |
| V | Venttiili |
| X | Muuta |
| Z | Turvalaite |
Yllä olevassa kaaviossa on FT=virtauslähetin, PT=Painelähetin, PC=Painesäädin, FC=Virtaussäädin ja FT=Virtauslähetin. FT/FC ja PT/PC muodostavat molemmat takaisinkytkentäsilmukoita, koska ne mittaavat ja ohjaavat samaa suureen. FC saa asetusarvon edellä olevasta PC:stä luodakseen kahden takaisinkytkentäsilmukan muodostaman kaskadisäätimen. Ylempi FT mittaa painehäiriön ja antaa paineensäätöön syöttöelementin. Syöttö- ja kaskadisäätimiä lisätään lisähäiriöiden torjumiseksi, ja ne ovat kehittyneempiä kuin tavallinen takaisinkytkentäsäätö.
Lohkokaaviot
Lohkokaaviot esittävät ohjausjärjestelmän lohkot ja niiden väliset kytkennät, jotka määrittävät tulojen ja lähtöjen suunnan ja kytkennät. Takaisinkytketty ohjausjärjestelmä koostuu anturista, toimilaitteesta ja säätimestä, jotka on kytketty toisiinsa silmukassa virtaavalla informaatiolla. Silmukka syntyy siten, että anturi antaa tietoa säätimelle. Säädin muuttaa säätimen ulostuloa, joka sitten muuttaa prosessia. Prosessi mitataan uudelleen ja sykli toistuu.
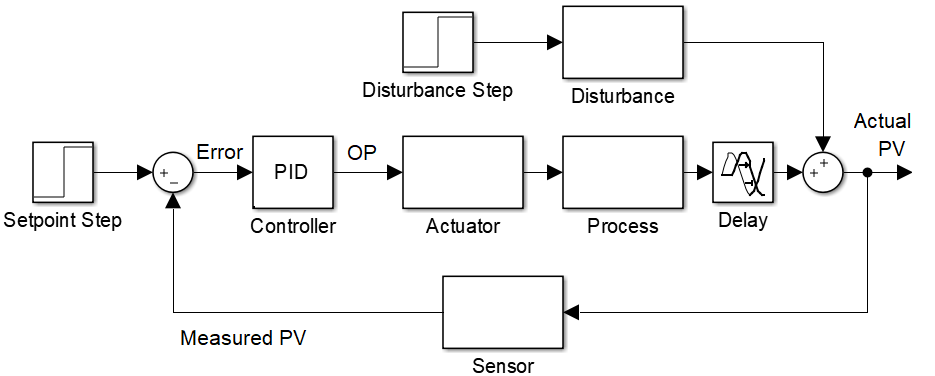
Lohkokaaviot eroavat prosessikaaviosta siinä, että ne kuvaavat informaation kulkua, eivät välttämättä sitä, miten laitteet on fyysisesti sijoitettu.
Säätöterminologia
On erilaista terminologiaa puhuttaessa yleisistä säätimistä, kuten proportionaalisesta integraalisesta derivaattorista (Proportional Integral Derivative, PID), tai edistyneistä säätimistä, kuten mallin ennakoivasta säädöstä (Model Predictive Control, MPC). Alla on taulukko eräistä termeistä ja niihin liittyvistä lyhenteistä.
| Elementti | Yleinen säätö (PID) | Kehittynyt säätö (MPC) |
| Aktuaattori | Säätimen ulostulo (CO) tai ulostulo (OP) | Säädetty muuttuja (MV) |
| Säädin | Säätöpiste. (SP) | Säätöpiste (SP) tai -alue (SPHI/SPLO) |
| Sensori | Prosessimuuttuja (PV) | Ohj. Variable (CV) |
| Häiriömuuttuja | Häiriömuuttuja (DV) | Häiriömuuttuja (DV) |