




力学と制御
 |
 |
 |
 |
|---|
フィードバック制御はあらゆるところに例が存在します。
- 操作して動作を起こすアクチュエータ
- 反応を測定するセンサ
- 測定値に応じてアクチュエータを調整するコントローラ
センサ測定値を受け取ったコントローラは、それを目標(セットポイント)と比較してアクチュエータの調整が必要かを判断します。 アクチュエータには、ON/OFFのような二値式のものもあれば、開放率(0~100%)のような連続式のものもあります。
例1:建物の温度制御
よく知られている制御装置の例として、冬場の建物の温度制御が挙げられます。 コントローラは、温度があるレベルより下がるとヒータをオンにし、温度があるレベルより上がるとヒータをオフにする。 外乱変数としては、外気温度の変化やドアの開閉による室内温度の変化などが考えられる。
| エレメント | 温度制御 |
| アクチュエータ | ヒータのバルブやスイッチ。 炉内燃料 |
| コントローラー設定値 | 室内の希望温度 |
| センサー | 熱電対、サーミスター等の温度センサー |
| 外乱 | ドア開度, 風、外気温 |
例2: 自動車の速度制御
オートクルーズコントロールのある自動車を考えてみましょう。 運転者はコントローラの速度設定点を調整することができる。 コントローラは速度計の読み(センサ)の変化に応答してアクセルペダル位置(アクチュエータ)を調整する。 外乱変数としては、所望の設定点からの速度の偏差を引き起こすような丘や風の接近が考えられる。
| Element | Cruise Control |
| Actuator | Gas Pedal Position(アクチュエータ)。 エンジンへの燃料供給 |
| コントローラ設定値 | 希望速度(mphまたはkm/sec) |
| センサー | スピードメーター, 測定された速度 |
| 外乱 | 丘、風、他の車 |
プロセス回路図
プロセス回路図は、送信機またはコントローラの種類を示す円で補強することが可能です。
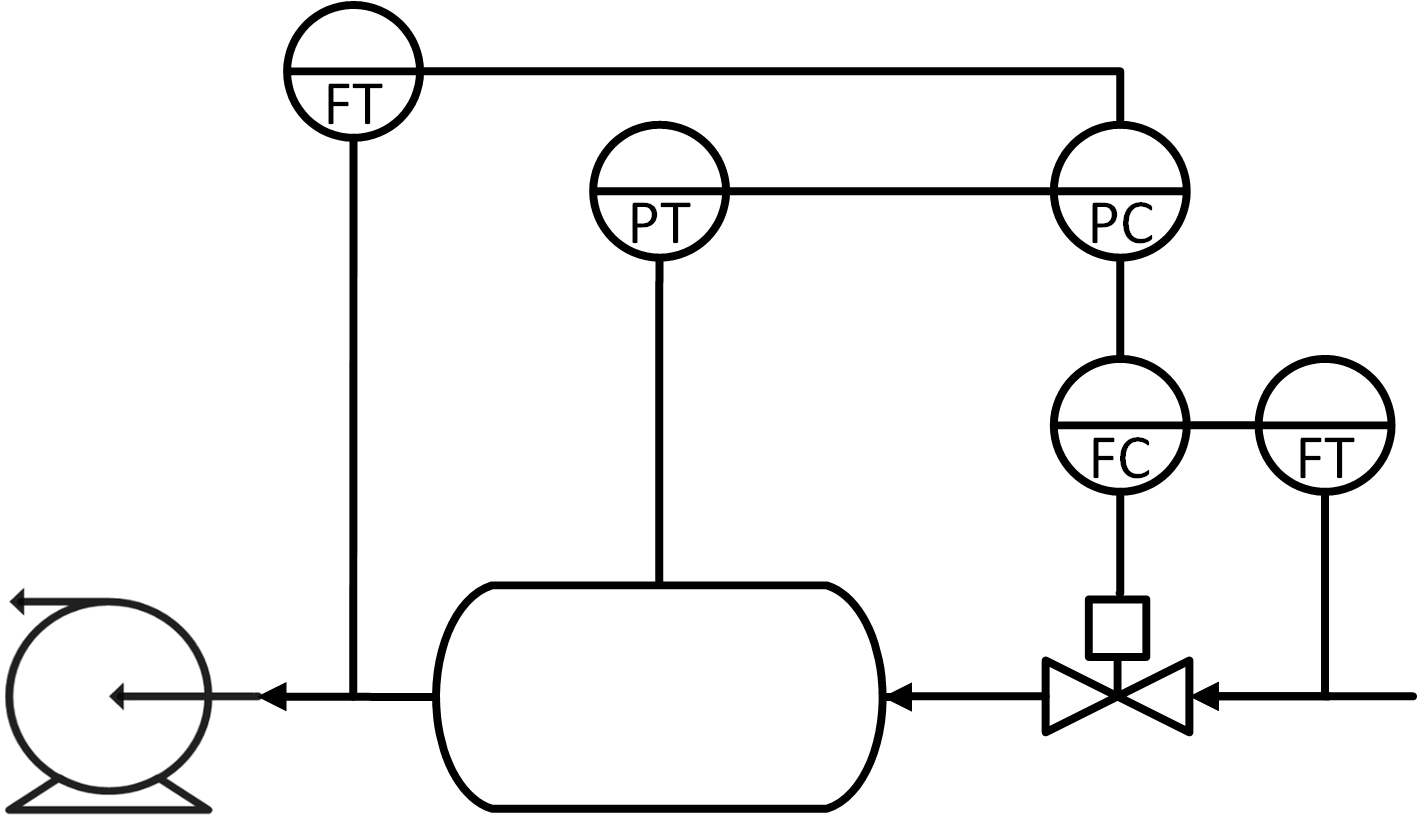
サークル名の2文字は、測定される量と、それがトランスミッタかコントローラかを示しています。
| 測定(文字1) | 説明 | ||
| A | アナライザ(モルまたは質量分率) | ||
| C | 濃度 | ||
| F | フロー | ||
| I | 電流 | ||
| L | レベル | ||
| P | 圧力 | ||
| R | 抵抗値 | ||
| S | Speed | ||
| T | Temperature | ||
| V | Vibration | ||
| X | その他 | ||
| デバイス(文字2) | 説明 | ||
| C | コントローラ | E | エレメント |
| I | インジケータ | ||
| M | モーター | ||
| S | スイッチ | ||
| T | トランスミッター/トランスデューサー | ||
| V | バルブ | ||
| X | その他 | ||
| Z | 安全装置 |
上図はFT=Flow Transmitterを使用しています。 PT=圧力トランスミッタ、PC=圧力コントローラ、FC=フローコントローラ、FT=フロートランスミッタです。 FT/FCとPT/PCは、同じ量を測定し制御しているので、ともにフィードバックループを形成しています。 FCは上のPCから設定値を受け取り、2つのフィードバックループによるカスケードコントローラを構成する。 上部のFTは圧力外乱を測定し,圧力制御へのフィードフォワード要素を提供する。 3222>
ブロック図
ブロック図は、制御システムのブロックと入出力の方向や接続を決める相互接続を示したものである。 フィードバック制御系は、センサ、アクチュエータ、コントローラがループ状に情報を流しながら接続されている。 センサーがコントローラーに情報を提供することでループが形成されます。 コントローラはコントローラ出力を変更し、それがプロセスを変化させる。
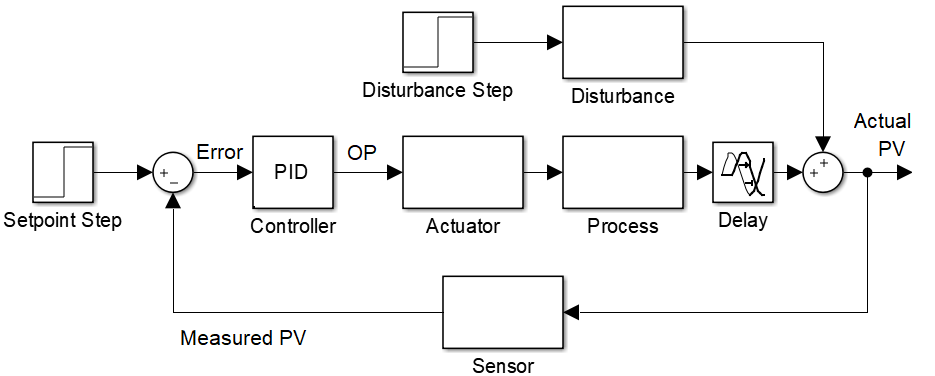
ブロック図はプロセス図とは異なり、情報の流れの図であり、必ずしも機器の一部が物理的に配置されているわけではありません。
制御用語
PID (Proportional Integral Derivative) のような一般のコントローラやMPC (Model Predictive Control) など高度なコントローラについては、異なる専門用語を使用しなければならないことがあります。 以下に、用語の一部と関連する略語を表にしています。
| 要素 | 共通制御 (PID) | 高度な制御 (MPC) | |
| アクチュエーター | コントローラ出力(CO)または出力(OP) | 操作対象変数(MV) | |
| コントローラ | セットポイント(Set Point (SP) | 設定値 (SP) または範囲 (SPHI/SPLO) | |
| センサー | プロセス変数 (PV) | コントロールされた変数 (PV) | コントロールされた変数 (PV) 変数 (CV) |
| 外乱 | 外乱変数 (DV) |